「プランクトン」は、水中を漂う生物の総称である。「漂う」とはいえ実は、餌を探す、食べる、敵から逃げる、配偶者を探す、といった目的をもって「動く」。本稿では、まずプランクトンとはどんな生物かを概説し、続いてその動きについての筆者の狭い研究成果を示し、最後にプランクトンの動きの研究も長い目で見て何かの役に立つに違いないという考えを述べる。
I. プランクトンとはどんな生物か
1. プランクトンの定義
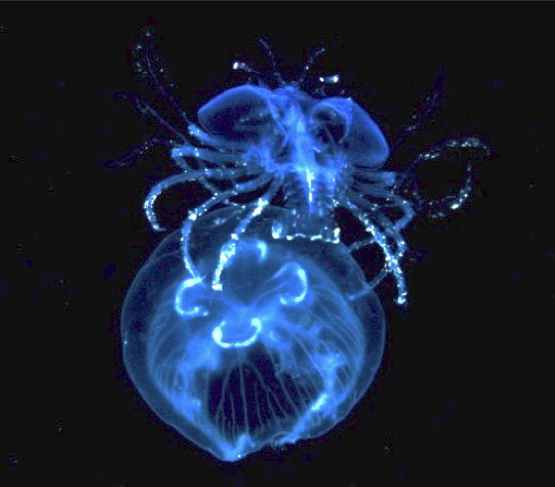
水中を漂う生物を分類学的な種やグループを特定せずひと括りに「plankton:プランクトン」と呼ぶことを、19世紀後半にヘンゼンが提唱した。語源は、ギリシャ語の「πλανκτοςさすらう者」で、天空を右往左往する惑星「planet」と共通しているらしい。これを、日本では20世紀初めに岡村金太郎が「浮游生物」と書いた(今では「浮生物」と「浮生物」が同じように使われている)。いずれにせよ、水中で、物体や他の生物などに固着しているのではなく、また「スイスイ」と泳ぐ力はなく、「浮かび、漂っている生物」という意味である。なお、「スイスイとは泳げない生物」では曖昧なので、便宜的に「プランクトンネットで採れた生物」をプランクトンと呼んでも良いと筆者は思っている(図1, 図2)。


2. プランクトン、ネクトン、ベントス
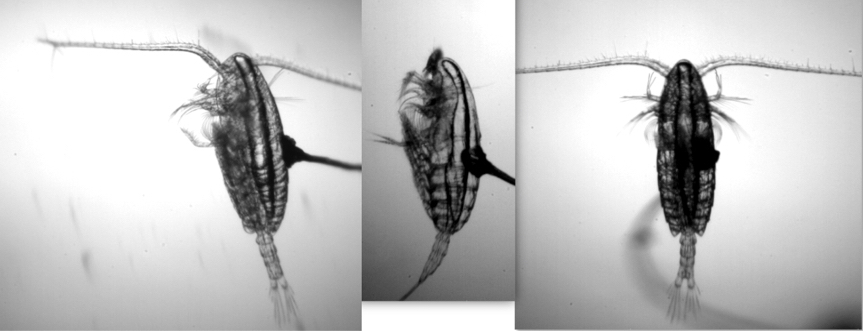
「漂う」プランクトンは、泳ぐ(水中で移動する)力が皆無か微弱で、「周囲の水とともに流される」。しかし実は、その泳力を無視できない場合もある。たとえばオキアミ類(図3)のように、一般にはプランクトンと呼ばれながら毎日数百メートルも上下方向に移動する者がある。これほど移動能力の大きい「プランクトン」は「マイクロネクトン」とも呼ばれる。「ネクトン: nekton」は、「遊泳生物(動物)」で、水中をスイスイと移動する頭足類、魚類、爬虫類や哺乳類などの総称である。いっぽう、底質(泥、砂、礫、岩、人工構造物など)に固着、または底質上か底質中を這って動くが底から離れることがない者は、「底生(棲)生物」で、「ベントス: benthos」と呼ばれる。やはり、ある分類群を特定する名称ではなく、そのような様式で生活している生物の総称で、あらゆる分類群に亘る。ネクトンもベントスも、元はギリシャ語で、それぞれ「νεκτος」、「βενθος」である。なお、プランクトンのうち水面に接して生活している者はニューストン(neuston)とも呼ばれる。

3. 一時プランクトンと終生プランクトン
水中の生物は、遊泳能力と生息場所(空間)でプランクトン、ネクトン、ベントスの3つに分けられるが、ある種類の生物を3つのうちのどれかと決められないこともある。たとえば、成体はスイスイと泳ぐ魚でも、多くの種で卵は水中を漂っている。漂う魚卵は1 mmほどの小ささで、孵った直後(「仔魚」と呼ばれる)も、魚とはいえ長さたかだか2-3 mmの「浮游生物」だ。仔魚は、成長すればやがてネクトンに昇格する。海底付近でじっとしていたり泳いだりするエイやアンコウなどは、ネクトンでもありベントスでもある。ウニ、エビ、カニ、貝など、多くの無脊椎動物は、卵や幼生の間はプランクトンで、漂いながら成長し、やがてベントスとなる(頭足類のようにネクトンになる者もある)。このように生活史のある時期だけ浮游する者は、一時プランクトンと呼ばれる(図4)。これに対して生涯漂って過ごす者もあり、それらは終生プランクトンと呼ばれる。
4. 植物プランクトンと動物プランクトン
さらにプランクトンは、「植物プランクトン」と「動物プランクトン」に大別される。植物プランクトンは、光合成色素を持ち、色素で太陽光を吸収し、光エネルギーを使って無機物から有機物を合成する生物である。このように有機物を自ら作ることが出来る者は、「独立栄養生物」と呼ばれる。植物プランクトンは、サイズ1-2 µmから大きくてせいぜい1-2 mmと小さく、水中を漂っている。いっぽう動物プランクトンは、文字どおり動くプランクトンである。光合成色素を持たず、自分では光合成ができず、有機物を他の生物やその排泄物あるいは死骸から摂取しなければ生きていけない「従属栄養生物」である。これらは、生きるために動く。動かなければ、餌も配偶者も得られないので、自身が生きていくことも、子孫を残すこともできない。そのうえ敵(捕食者)から逃れることもできない。いつも漂っているわけにはいかないのである。
なお、光合成を行う独立栄養生物「植物プランクトン」にも、繊毛や鞭毛などで泳ぐ(あるいはゆっくり動く)者がある。光合成に適した環境を求めるため、また、動物プランクトンによる摂食を免れるため、と考えられる。「植物なのに泳ぐ」生物の存在は、不思議だが本当なのだ。
5. プランクトンの大きさと水の粘性
プランクトンは、単独で2 mを超えるエチゼンクラゲのような者や、長さ数十mの群体を成すクダクラゲ類のような者もあるが、大部分は数mm以下と小さい。数mmの生物を構成する各器官は、十分の1 mm(ヒトの毛髪の太さほど)かもっと小さく百分の1 mmほどであり、肉眼では見えない。最も小さいバクテリアでは1 µmほどかそれ以下であり顕微鏡を使わなければ見えない。
これほど小さい生物が水の中で動くとき、水の粘性が問題になる。流体(液体であれ気体であれ)の中を動く物体にはたらく慣性と物体が受ける粘性抵抗との比を表すレイノルズ数(Reynolds number: Re)が1よりも大きいとき、その物体の運動には慣性が相対的に大きく作用し、粘性抵抗はあまり問題にはならない。しかし、Reが1に近いか1よりも小さい運動では粘性が無視できないようになる。ヒトの大きさでは殆ど意識もしないが、数mmの動物プランクトンの付属肢、100 µmほどの無脊椎動物幼生、数µmほどの精子、1 µmほどのバクテリアのように小さい物の動きでは、レイノルズ数が1よりもずっと小さい(表1)。
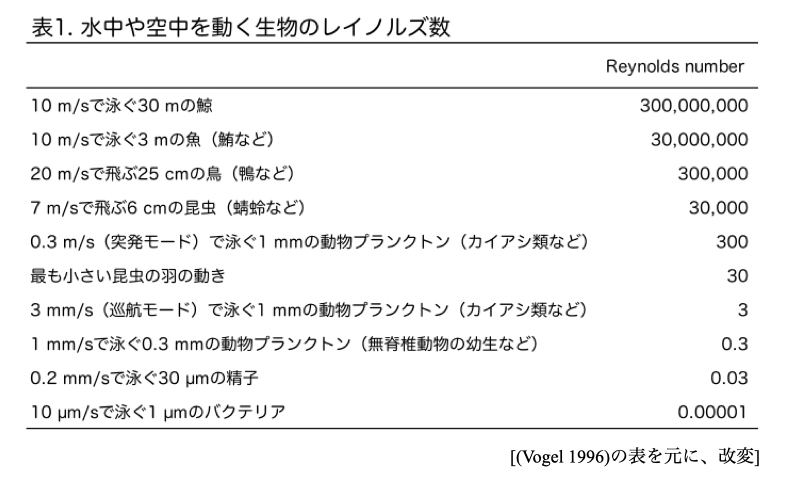
このように小さい生物の運動では、駆動を止めるとほぼ瞬時に停止してしまう。例えば、30 µm/sで泳ぐ1 µmのバクテリアでは、1 µs以内に百分の1 nmも動かずに止まってしまう(Purcell 1977)。慣性は全く無効である。これほど小さい生物にとっては、水はネバネバの障壁である。
II 浮游生物の動きの直接観察
1. プランクトンを生きたまま観ること
私は、大学生やもっと若い人向けの講義で、まず浮游生物の絵や写真、可能なときには実物を見せる。さらに、ホルマリン漬けの標本を顕微鏡で観察描画させたりする。生(なま)のプランクトンを見せる機会を用意するのは容易ではない。海や湖から採ってこなければならず、採ってきてもすぐに死んでしまい、ホルマリンなどで固定しないとみるみるうちに腐ってしまうからである。
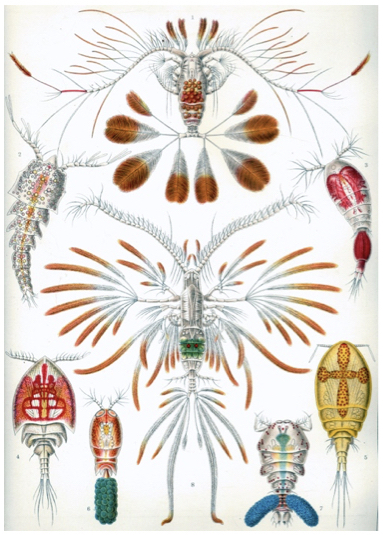
標本は死体である。姿勢が崩れ色も抜けており、あまり美しくない。死体を見せて「プランクトンの素晴らしい形や生き方」を力説しても学生の心に響かないので、なんとか興味を引くために、ヘッケルが百年以上も前に描いたプランクトンの絵(図5)の助けを借りて「海には芸術的なほど綺麗な生物が漂っている」と説明したりている。
2. プランクトンの動きを高速度撮影して観ること
小さいプランクトンのさらに細部の構造は、顕微鏡の助けがないと観察できない。さらに、生きたプランクトンは、驚くほど速く動ける。カイアシ類を水槽に入れて見ていると、視界から「ぱっ」と消えたり、水面から飛び出したりすることもある(Tanaka 2014)。このような遊泳を「突発的遊泳」、「バーストスイミング」、あるいは「ジャンプ」などと呼ぶ。目にもとまらぬ動きなので、肉眼では勿論、通常のビデオでも、いつ何が起こっているのか視認できない。そこで、高速度カメラが役に立つ。もともと軍事や工業用に開発されてきた機械であったが、技術の飛躍的進歩とともに民生用に比較的廉価になり、プランクトンを細々と研究する私にも利用する機会が訪れた。
その恩恵で、たとえば、体長2 mmのカイアシ類が水中を1 m/sの速さで泳ぎ、0.2 sの間に(文字通り瞬く間に)0.2 mも移動することが明らかになった。0.2 mは、ヒトの感覚では大した距離ではないかも知れないが2 mmの動物にとっては体長の百倍もある。それを捕えて食べようとする魚にとっても相当に厄介な距離であろう。
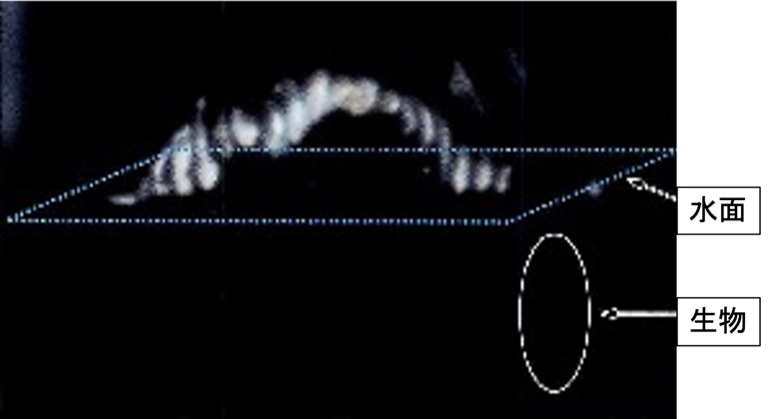
また、水面を切って空中にジャンプすることもある(図6)。
先に述べた粘性の影響を考えると、カイアシ類の突発的遊泳やジャンプは、驚くべき行動である。このサイズの物体がネバネバの水の中でこれほど速く動くには「極めて巧妙」に作られていなければならない(Svetlichny et al. 2020)。ジャンプを支える「極めて巧妙」な要素(体の構造、筋肉、神経、エネルギーの供給など)を詳しく調べることは、生物の形や動きに倣って人工物を造るバイオミミクリーの世界で基本的に重要であろう。
3. プランクトンを髪の毛に接着し、視野に固定して観ること
「動く」プランクトンを顕微鏡で見るには、レンズの狭い視野や浅い被写界深度の中に留めておかなければならない。しかし、薬品で固定すると死んでしまうし、麻酔すると動きが正常でなくなる。したがって、生きたままの自然な動きを顕微鏡的に観察することは困難であった。
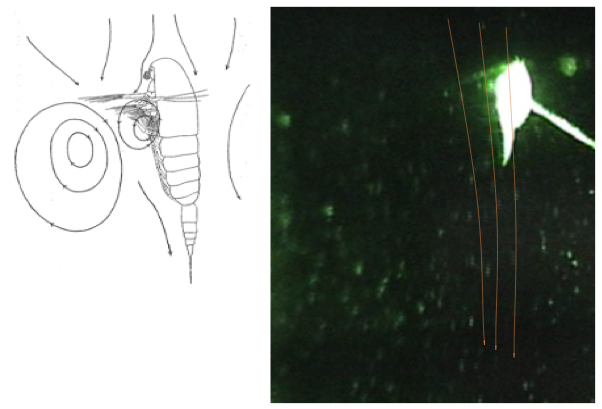
しかし、世界には凄い人が居るものだ。ウィスコンシン大学のストリックラー先生(スイス人)は、工学的な技術と知識をプランクトンの観察に応用する研究を1970年頃から始め、プランクトンを犬の毛や髪の毛に接着し顕微鏡の視野に留めたまま観察する、という独創的方法を考案し、カイアシ類の付属肢の動きを顕微高速度撮影する、という仕事を世界に先駆けて行った。カイアシ類の付属肢(顎脚や遊泳脚など)は、毎秒何十回も振動するので、目で見ても何も分からないが、毎秒500コマ以上の高速度撮影(当時まだビデオはない)によって、高速に振られる付属肢の精巧で調和的な動きを見ることに成功したのである。この独創的手法で得た研究成果は、「20世紀後半50年における海洋学の画期的成果の一つ」と評価されている(National Research Council 2000)。
幸運にも筆者は、20年前にストリックラー先生の指導を受ける機会を得た。図7、8、9に、この「コロンブスの卵」のような手法で記録した画像の幾つかを紹介する。

なお、カイアシ類よりもっと小さいゾウリムシ(長さ0.2 mmほど)の繊毛運動や、精子の鞭毛運動などについては、実験室で培養される生物を材料として、生物学者だけでなく工学者らによっても調べられている。
III. 「プランクトンの動き」の研究もいつか何かの役に立つ
昭和時代半ばに生まれた私は、物心つく頃に手塚治虫の漫画に没入していた。半世紀前に「鉄腕アトム」などに描かれた21世紀の世界をいま見ると、手塚は未来を眺めていたのではないかと思える。2020年の東京の街は、あたかも手塚の設計どおりに作られているようだ。都心では、林立するビルの隙間を切り裂く道路を自動操縦車が走り、空中にはドローンが浮揚している。個人が携帯端末で画像も含めた情報を送受している。様々な現場でロボットが活躍しつつある。
手塚の作品には「ブラックジャック」をはじめ医学的知識と哲学が凝集したものもある。それらの中に、1948年発表の「吸血魔團」がある。体を縮める薬でバクテリアほどの大きさになった少年とヒゲオヤジが人の体内に入り、肺で穴をあけていた結核菌を説得し・・・、というような筋である。当時は「漫画の中のお話し」と受け止められていたと想像されるが、今では、血管内を自走するほど小さく精密なマイクロロボットの研究が、実用に向けて急速に進んでいる(Xu et al. 2019)。
このような「人体内で活動できるマイクロロボット」の着想は、1966年発表の米国映画「Fantastic Voyage(ミクロの決死圏)」が最初であるようにしばしば記述されるが、実は我国が誇る手塚治虫の独創的漫画が元になっているようである。1959年にファイマンがCaltechで行った有名な講演(およびそれを元にした論文)「There’s Plenty of Room at the Bottom: An Invitation to Enter a New Field of Physics」(Feynmann 1960)は、人体内で動作する微小機械の可能性にも言及している。
1959年にファインマンが手塚の作品を知っていたかどうか想像もできないが、その十年以上前に手塚が「血管内を自走するほど小さく精密なマイクロロボット」に繋がるような着想を発表していたことは確かである。70余年を経て技術が飛躍的に進んだ今、当時は「漫画の中」でしか有り得なかったような微小機械が現実的になりつつある(Sitti 2017)。さらに、プランクトンやバクテリアのサイズを飛び越えて、もっと小さい物体の制御も叶うのだろう。実際、2016年のノーベル化学賞は「分子でメカニカルな機構を模倣する基礎研究」に授与された(Astumian 2017)。今後さらに、社会的要請にも押されて微小ロボットの研究と開発・応用がより急速に進み展がっていくのは疑いない(Kabir et al. 2020)。
IV. 最後に
プランクトンの動きを調べる行いは、生物の一員である人類の福祉と生活の安定、延いては世界の平和や地球の保全にいくらか貢献するだろう。ノミほどの大きさ(小ささ)の生物のさらに一部分(カナ四字で書かれる器官など)のような細かすぎる対象を調べてどうする、などと冷やかされることがあるが、何時か何処かで何かの役に立つと筆者は考えている。たとえば、「医療や産業、環境保全などに貢献する微小機械の実用化」への道では、何億年もかけて選び抜かれた末に現代の地球上に命を繋いでいる生物の絶妙で精巧な仕掛けを学び真似ることが、必ず有用だ。
引用文献
Astumian, R. D. 2017. How molecular motors work – insights from the molecular machinist’s toolbox: the Nobel prize in Chemistry 2016. Chemical Science (Royal Society of Chemistry: 2010) 8:840-845.
Cannon, H. G. 1928. On the feeding mechanism of the copepods, Calanus finmarchicus and Diaptomus gracilis. British Journal of Experimental Biology 6:131-144.
Feynmann, R. P. 1960. There’s plenty of room at the bottom: An invitation to enter a new field of physics. Engineering and Science magazine XXIII:22-36.
Haeckel, E. 1974. Art Forms in Nature. Dover Publications, New York.
Kabir, A. M. R., D. Inoue, and A. Kakugo. 2020. Molecular swarm robots: recent progress and future challenges. Science and Technology of Advanced Materials 21:323-332.
Kamio, M., D. Furukawa, K. Wakabayashi, K. Hiei, H. Yano, H. Sato, Y. Yoshie-Stark, T. Akiba, and Y. Tanaka. 2015. Grooming behavior by elongated third maxillipeds of phyllosoma larvae of the smooth fan lobster riding on jellyfishes. Journal of Experimental Marine Biology and Ecology 463:115-124.
National Research Council 2000. 50 Years of Ocean Discovery: National Science Foundation 1950-2000. National Academies Press, Washington, DC.
Purcell, E. M. 1977. Life at low Reynolds-number. American Journal of Physics 45:3-11.
Sitti, M. 2017. Mobile Microrobotics. The MIT Press, Cambridge, Massachusetts; London, England.
Svetlichny, L., P. S. Larsen, and T. Kiørboe. 2020. Kinematic and dynamic scaling of copepod swimming. Fluids 5:68; doi:10.3390/fluids5020068.
Tanaka, Y. 2014. High-speed imaging in copepod behavior. Pages 145–156 in L. Seuront, editor. Copepods: Diversity, Habitat, and Behavior. Nova Publishers, Hauppauge, NY, USA.
Vogel, S. 1996. Life in Moving Fluids: The Physical Biology of Flow – Revised and Expanded Second Edition. Princeton University Press.
Wakabayashi, K., R. Sato, A. Hirai, H. Ishii, T. Akiba, and Y. Tanaka. 2012. Predation by the phyllosoma larva of Ibacus novemdentatus on various kinds of venomous jellyfish. Biological Bulletin 222:1-5.
若林香織, 田中祐志, 阿部秀樹. 2017. 美しい海の浮遊生物図鑑. 文一総合出版.
Xu, B., X. Han, Y. Hu, Y. Luo, C. H. Chen, Z. Chen, and P. Shi. 2019. A remotely controlled transformable soft robot based on engineered cardiac tissue construct. Small 15:e1900006.
-

地球環境における海の役割 ―海の砂漠化と海洋生態系の未来―
-

海の環境危機と持続可能な海洋利用 ―資源・エネルギー・食糧―
-

日本型沿岸域総合的管理による海の環境保護と 持続可能な地域社会づくり —里海とコモンズの視点から—
-

海の生物資源を増やすための環境づくり
-

海と気候と二酸化炭素 ―海洋シミュレーションと地球温暖化予測―
-

私の三大深海銘景